前言
Timer 計時器是各個 MCU 中都會有的基本功能。正如其名,當需要精確定時以進行控制時,Timer 就會派上用場,Timer 還可以用來產生 PWM 訊號,是很常用的功能。
上一篇已經簡單介紹要如何計算 Timer 的 PSC 與 ARR 來得到想要的頻率了,這一篇就要來看看實際的程式。
這篇的目標是使用 Timer 來讓 LED 的閃爍頻率更精確且方便修改。
正文
首先一樣以 Nucleo-F446RE 做示範。
首先建立一個 PIO 的專案,選擇 Framework 爲「libopencm3」,並在 src/ 資料夾中新增並開啓 main.c 檔案。
完整程式
1/**
2 * @file main.c
3 * @brief Timer example for STM32 Nucleo-F446RE.
4 */
5
6#include <libopencm3/stm32/rcc.h>
7#include <libopencm3/stm32/gpio.h>
8#include <libopencm3/stm32/timer.h>
9#include <libopencm3/cm3/nvic.h>
10
11#define GOAL_FREQUENCY (5) /* Goal frequency in Hz. */
12#define TIMER_CLOCK (rcc_apb1_frequency * 2) /* f_timer. */
13#define COUNTER_CLOCK (1000000) /* f_counter (CK_CNT). */
14#define TIMER_PRESCALER (TIMER_CLOCK / COUNTER_CLOCK - 1) /* PSC */
15#define TIMER_PERIOD (((TIMER_CLOCK) / ((TIMER_PRESCALER + 1) * GOAL_FREQUENCY)) - 1) /* ARR */
16
17#define RCC_LED_GPIO (RCC_GPIOA)
18#define GPIO_LED_PORT (GPIOA)
19#define GPIO_LED_PIN (GPIO5) /* D13. */
20
21static void rcc_setup(void)
22{
23 /* Setup system clock. */
24 rcc_clock_setup_pll(&rcc_hse_8mhz_3v3[RCC_CLOCK_3V3_168MHZ]);
25
26 rcc_periph_clock_enable(RCC_LED_GPIO);
27 rcc_periph_clock_enable(RCC_TIM2);
28 rcc_periph_reset_pulse(RST_TIM2); /* Reset TIM2 to defaults. */
29}
30
31static void led_setup(void)
32{
33 /* Set LED pin to output push-pull. */
34 gpio_mode_setup(GPIO_LED_PORT, GPIO_MODE_OUTPUT, GPIO_PUPD_NONE, GPIO_LED_PIN);
35 gpio_set_output_options(GPIO_LED_PORT, GPIO_OTYPE_PP, GPIO_OSPEED_2MHZ, GPIO_LED_PIN);
36}
37
38static void timer_setup(void)
39{
40 timer_set_mode(TIM2,
41 TIM_CR1_CKD_CK_INT,
42 TIM_CR1_CMS_EDGE,
43 TIM_CR1_DIR_UP);
44 timer_disable_preload(TIM2);
45 timer_continuous_mode(TIM2);
46
47 timer_set_prescaler(TIM2, TIMER_PRESCALER); /* Setup TIMx_PSC register. */
48 timer_set_period(TIM2, TIMER_PERIOD); /* Setup TIMx_ARR register. */
49
50 /* Setup interrupt. */
51 timer_enable_irq(TIM2, TIM_DIER_UIE);
52 nvic_enable_irq(NVIC_TIM2_IRQ);
53
54 timer_enable_counter(TIM2);
55}
56
57int main(void)
58{
59 rcc_setup();
60 led_setup();
61 timer_setup();
62
63 while (1)
64 { /* Do nothing. */ }
65 return 0;
66}
67
68/**
69 * @brief Timer2 Interrupt service routine.
70 */
71void tim2_isr(void)
72{
73 if (timer_get_flag(TIM2, TIM_SR_CC1IF)) /* Get Capture/Compare 1 interrupt flag. */
74 {
75 timer_clear_flag(TIM2, TIM_SR_CC1IF);
76 gpio_toggle(GPIO_LED_PORT, GPIO_LED_PIN); /* LED on/off. */
77 }
78}
分段說明
Include
1#include <libopencm3/stm32/rcc.h>
2#include <libopencm3/stm32/gpio.h>
3#include <libopencm3/stm32/timer.h>
4#include <libopencm3/cm3/nvic.h>
除了基本的 rcc.h 和 gpio.h 外,當然還有這次的重點——timer.h。因爲會用到中斷的功能,所以 nvic.h 也是必要的。
Timer 頻率
1#define TIMER_CLOCK (rcc_apb1_frequency * 2) /* f_timer. */
這裡以 TIMER_CLOCK 設定 Timer 的頻率。在上一篇得知要使用的 TIM2 頻率與 APB1 頻率及其預除頻值有關。
我們後續的 RCC 設定會讓 APB1 的預除頻器不爲 /1,所以 TIM2 clock = 2* APB1 clock。定義 TIMER_CLOCK 爲 rcc_apb1_frequency * 2。其中 rcc_apb1_frequency 的實際數值會在後續的 RCC 步驟中由 LibOpenCM3 設定好,我們只需要直接調用就好了。
PSC 暫存器(Counter 頻率)
1#define COUNTER_CLOCK (1000000) /* f_counter (CK_CNT). */
2#define TIMER_PRESCALER (TIMER_CLOCK / COUNTER_CLOCK - 1) /* PSC */
根據上一篇的內容可以知道 Counter 的頻率計算公式爲:CK_CNT = CK_PSC / (PSC + 1)
所以PSC = CK_PSC / CK_CNT - 1
CK_CNT:Counter 的計數頻率,也就是預除頻器的輸出頻率。CK_PSC:預除頻器的輸入頻率,也就是 Timer 頻率。PSC:TIMx_PSC 暫存器的值(除頻值)。
這裡我定義了一個 COUNTER_CLOCK 來設定 Counter 的計數頻率 CK_CNT,以供下面設定 PSC 時使用。這個值不是絕對或唯一的,基本上只要不會導致算出的 PSC 值大到超出其暫存器的上限都可以。
我將預除頻值 PSC 以 TIMER_PRESCALER 爲名定義爲 TIMER_CLOCK / COUNTER_CLOCK - 1。這個值會存進 TIMx_PSC 暫存器。
ARR 暫存器
1#define GOAL_FREQUENCY (5) /* Goal frequency in Hz. */
2
3#define TIMER_PERIOD (((TIMER_CLOCK) / ((TIMER_PRESCALER + 1) * GOAL_FREQUENCY)) - 1) /* ARR */
複習一下上一篇的公式:
f_overflow:Overflow 的發生頻率,也就是我們的目標頻率。f_counter:Counter 的計數頻率,也就是上面的CK_CNT。f_timer:Timer 的頻率,也就是上面的CK_PSC。ARR:TIMx_ARR 暫存器的值。PSC:TIMx_PSC 暫存器的值。
這裡以 GOAL_FREQUENCY 定義目標頻率 f_overflow。
再來只要套用上面的公式去設定 ARR 的值就可以了。這裡以 TIMER_PERIOD 爲名定義 ARR 爲 (TIMER_CLOCK / ((TIMER_PRESCALER + 1) * GOAL_FREQUENCY)) - 1。這個值會存進 TIMx_ARR 暫存器。
確認數值
雖然理論上只要照著上面的公式設定 PSC 與 ARR 就可以了,所以 PSC 與 ARR 的值會超多種組合,不過實際使用時要注意一下 PSC 與 ARR 的空間。
TIM2_ARR 是 32 位元的暫存器,TIM2_PSC 是 16 位元的暫存器,所以 ARR 的值不能超過 2^32,而 PSC 的值不能超過 2^16。
我們來驗證一下。在後續的 RCC 設定中 rcc_apb1_frequency 會被設定成 42000000,也就是 42 MHz,而 GOAL_FREQUENCY 爲 5。
1TIMER_CLOCK = rcc_apb1_frequency * 2
2 = 84M
3
4TIMER_PRESCALER = TIMER_CLOCK / COUNTER_CLOCK - 1
5 = 83 // 83 < 2^16 (TIM2_PSC)
6
7TIMER_PERIOD = (TIMER_CLOCK / ((TIMER_PRESCALER + 1) * GOAL_FREQUENCY)) - 1
8 = (84M / (84 * 5)) - 1
9 = (84M / 420) - 1
10 = 199999 // 199,999 < 2^32 (TIM2_ARR)
順便來驗證一下頻率的計算:
1CK_CNT = CK_PSC / (PSC + 1)
2 = 84M / (83 + 1)
3 = 1M
Counter 的計數頻率是 1 MHz,也就是每秒數 1,000,000 次。而 ARR 值爲 199999,也就是 Counter 會從 0 數到 199,999(共計數 200,000 次)後發生 Overflow。
每計數 200 K 次就會發生 Overflow,1 秒會計數 1,000 K 次,所以每秒會發生 5 次 Overflow(5 Hz),正確無誤。
RCC
1static void rcc_setup(void)
2{
3 /* Setup system clock. */
4 rcc_clock_setup_pll(&rcc_hse_8mhz_3v3[RCC_CLOCK_3V3_168MHZ]);
5
6 rcc_periph_clock_enable(RCC_LED_GPIO);
7 rcc_periph_clock_enable(RCC_TIM2);
8 rcc_periph_reset_pulse(RST_TIM2); /* Reset TIM2 to defaults. */
9}
這邊比較重要的是 rcc_clock_setup_pll(&rcc_hse_8mhz_3v3[RCC_CLOCK_3V3_168MHZ])
這行的意思是指定時鐘源爲 HSE(High Speed External),且其頻率爲 8MHz,並將系統時鐘設定爲 168 MHz。這個函式也會一併設定好上面用到的 rcc_apb1_frequency 值,和決定 APB1 的預除頻值等各種與時鐘樹有關的設定。
我們可以在 VSCode 中查看它實際設定了什麼,這些都定義在 lib/stm32/f4/rcc.c 中: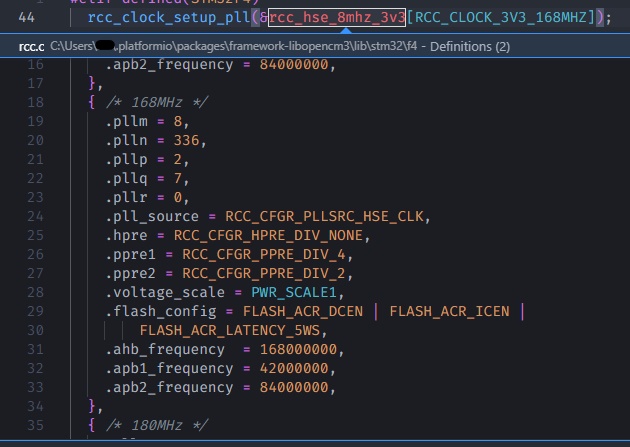
可能會有人覺得奇怪,Nucleo-F446RE 上面的 X3 根本就沒有裝石英振盪器,而 X2 是 32 KHz 的 LSE,那這個 8 MHz 的 HSE 是從哪來的?
答案是從 ST-Link 來的。Nucleo 預設配置好 ST-Link 的 MCO(Microcontroller Clock Output),它會固定輸出 8 MHz。當然你也可以不使用 ST-Link 的 MCO 作爲 HSE 源,只要照著 UM1724 裡的說明調整即可。
▲ Nucleo 預設使用 ST-Link MCO 做爲 HSE。取自 UM1724。
設定 Timer
1static void timer_setup(void)
2{
3 timer_set_mode(TIM2,
4 TIM_CR1_CKD_CK_INT,
5 TIM_CR1_CMS_EDGE,
6 TIM_CR1_DIR_UP);
7 timer_disable_preload(TIM2);
8 timer_continuous_mode(TIM2);
9
10 timer_set_prescaler(TIM2, TIMER_PRESCALER); /* Setup TIMx_PSC register. */
11 timer_set_period(TIM2, TIMER_PERIOD); /* Setup TIMx_ARR register. */
12
13 /* Setup interrupt. */
14 timer_enable_irq(TIM2, TIM_DIER_UIE);
15 nvic_enable_irq(NVIC_TIM2_IRQ);
16
17 timer_enable_counter(TIM2);
18}
在這裡設定好 Timer 的相關參數,包含啓用中斷、設定 PSC(timer_set_prescaler())與 ARR (timer_set_period())的值等。
timer_set_mode() 的 TIM_CR1_CKD_CK_INT 代表 TIMx_CR1(Control register 1) 的 CKD(Clock division) 會設爲 00 不分頻;TIM_CR1_CMS_EDGE 則是 CMS(Center-aligned mode selection)會設爲 00,設定爲邊緣對齊模式;TIM_CR1_DIR_UP 是設定 DIR(Direction)爲 0 以使用上數計數器模式。
timer_disable_preload() 會設定 TIMx_CR1 的 ARPE(Auto-reload preload enable)爲 0,以禁用 ARR 的 Preload 功能。
timer_continuous_mode() 會將 TIMx_CR1 的 OPM(One-pulse mode)設爲 0,令 Counter 在 Update event 之後也不會停止,可以一直計數。
有關 F446RE 的 TIMx_CR1 的詳細說明可以查看 RM0390。
Timer ISR
1/**
2 * @brief Timer2 Interrupt service routine.
3 */
4void tim2_isr(void)
5{
6 if (timer_get_flag(TIM2, TIM_SR_CC1IF))
7 {
8 timer_clear_flag(TIM2, TIM_SR_CC1IF);
9
10 gpio_toggle(GPIO_LED_PORT, GPIO_LED_PIN); /* LED on/off. */
11 }
12}
這是 TIM2 的 ISR。每當 TIM2 發生中斷時,先清除中斷旗標,然後切換 LED on/off。
多環境程式(F446RE + F103RB)
由於 STM32F1 的部分函式不同,所以 F103RB 沒辦法直接使用上面的 F446RE 的程式。
以下列出主要的差異部分,也就是 RCC 與 GPIO 的部分。完整的程式請看 GitHub repo。
1static void rcc_setup(void)
2{
3 /* Setup system clock. */
4#if defined(STM32F1)
5 rcc_clock_setup_in_hse_8mhz_out_72mhz();
6#elif defined(STM32F4)
7 rcc_clock_setup_pll(&rcc_hse_8mhz_3v3[RCC_CLOCK_3V3_168MHZ]);
8#endif
9
10 rcc_periph_clock_enable(RCC_LED_GPIO);
11 rcc_periph_clock_enable(RCC_TIM2);
12 rcc_periph_reset_pulse(RST_TIM2); /* Reset TIM2 to defaults. */
13}
1static void led_setup(void)
2{
3 /* Set LED pin to output push-pull. */
4#if defined(STM32F1)
5 gpio_set_mode(GPIO_LED_PORT,
6 GPIO_MODE_OUTPUT_2_MHZ,
7 GPIO_CNF_OUTPUT_PUSHPULL,
8 GPIO_LED_PIN);
9#else
10 gpio_mode_setup(GPIO_LED_PORT, GPIO_MODE_OUTPUT, GPIO_PUPD_NONE, GPIO_LED_PIN);
11 gpio_set_output_options(GPIO_LED_PORT, GPIO_OTYPE_PP, GPIO_OSPEED_2MHZ, GPIO_LED_PIN);
12#endif
13}
成果
這是實際輸出的波形,D6 與 D7 分別爲設定目標頻率爲 5 Hz 與 100 Hz,可以看出相當精準。
▲ 實際輸出的波形。
注意,我們在程式中設定的目標頻率是「切換頻率」,而示波器量測的是「波形頻率」,GPIO 的輸出要切換 2 次才是一個完整的波形,所以示波器上顯示的頻率才會是程式設定的一半。
小結
這次接續上一篇的內容,寫出 Timer 的程式,也驗證了上一篇的計算公式。
參考資料
- libopencm3/libopencm3-examples
- platformio/platform-ststm32
- STM32F446RE datasheet (DS10693)
- STM32F446xx reference manual (RM0390)
- STM32F103RB datasheet (DS5319)
- STM32 Nucleo-64 board user manual (UM1724)
本文的程式也有放在 GitHub 上。
本文同步發表於 iT 邦幫忙-2022 iThome 鐵人賽。
留言可能不會立即顯示。若過了幾天仍未出現,請 Email 聯繫:)
comments powered by Disqus